`.
 @@ -106,14 +111,17 @@ Euclidean distance, only the `Supervisor` can calculate it, because it has
access to all entities in the `World`.
You can follow the
-[emitter-receiver scheme tutorial](https://github.com/aidudezzz/deepbots-tutorials/blob/master/emitterReceiverSchemeTutorial/README.md)
+`emitter-receiver scheme tutorial `_
to get started and work your way up from there.
@@ -106,14 +111,17 @@ Euclidean distance, only the `Supervisor` can calculate it, because it has
access to all entities in the `World`.
You can follow the
-[emitter-receiver scheme tutorial](https://github.com/aidudezzz/deepbots-tutorials/blob/master/emitterReceiverSchemeTutorial/README.md)
+`emitter-receiver scheme tutorial `_
to get started and work your way up from there.
-#### Combined Robot-Supervisor scheme
+.. _combined:
+
+Combined Robot-Supervisor scheme
+--------------------------------
As mentioned earlier, in use-cases where the observation transmitted between
the `Robot` and the `Supervisor` is high-dimensional or long, e.g. high
@@ -125,11 +133,12 @@ communication. This new controller runs on the `Robot`, but requires
`Supervisor` privileges and is limited to one `Robot`, one `Supervisor`.
You can follow the
-[robot-supervisor scheme tutorial](https://github.com/aidudezzz/deepbots-tutorials/tree/master/robotSupervisorSchemeTutorial)
+`robot-supervisor scheme tutorial `_
to get started and work your way up from there. We recommended this
tutorial to get started with deepbots.
-### Abstraction Levels
+Abstraction Levels
+------------------
The deepbots framework has been created mostly for educational purposes. The
aim of the framework is to enable people to use Reinforcement Learning in
@@ -141,7 +150,7 @@ the top level of the abstraction hierarchy is the `SupervisorEnv` which is the
OpenAI gym interface. Below that level there are partially implemented classes
with common functionality. These implementations aim to hide the communication
between the `Supervisor` and the `Robot`, as described in the two different
-schemes ealier. Similarly, in the `emitter`/`receiver` scheme the `Robot` also
+schemes earlier. Similarly, in the `emitter`/`receiver` scheme the `Robot` also
has different abstraction levels. According to their needs, users can choose
either to process the messages received from the `Supervisor` themselves or use
the existing implementations.
\ No newline at end of file
diff --git a/docs/index.rst b/docs/index.rst
index 63ddc75..7680196 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -28,6 +28,7 @@ Contents
Home
installation
+ how_deepbots_works
.. toctree::
:maxdepth: 2
From 55360cf2de06d820c76458636becb8d6ce96d40d Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 20:22:03 +0300
Subject: [PATCH 101/139] Fixed image entries
---
docs/how_deepbots_works.rst | 16 +++++++---------
1 file changed, 7 insertions(+), 9 deletions(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index 742f239..9654c4b 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -49,6 +49,7 @@ First of all let's set up a simple glossary:
"touches" the goal.
* `reset()`: Used to reset the world to the initial state.
+
In order to set up a task in Deepbots it is necessary to understand the
intention of the OpenAI gym environment. According to the OpenAI gym
documentation, the framework follows the classic “agent-environment loop”.
@@ -56,9 +57,8 @@ documentation, the framework follows the classic “agent-environment loop”.
`observation` and a `reward`. The process gets started by calling `reset()`,
which returns an initial `observation`."
-
-  -
-
+.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots/dev/doc/img/agent_env_loop.svg
+ :alt: Agent-environment loop
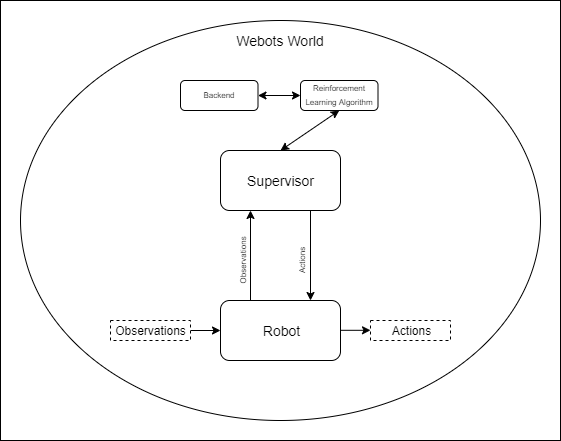
Deepbots follows this exact agent-environment loop with the only difference
being that the agent, which is responsible to choose an action, runs on the
@@ -92,9 +92,8 @@ combines the `Supervisor` and the `Robot` into one controller and circumvents
that issue, while being less flexible, which is discussed
:ref:`later `.
-
-
-
+.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots/dev/doc/img/deepbots_overview.png
+ :alt: Deepbots overview
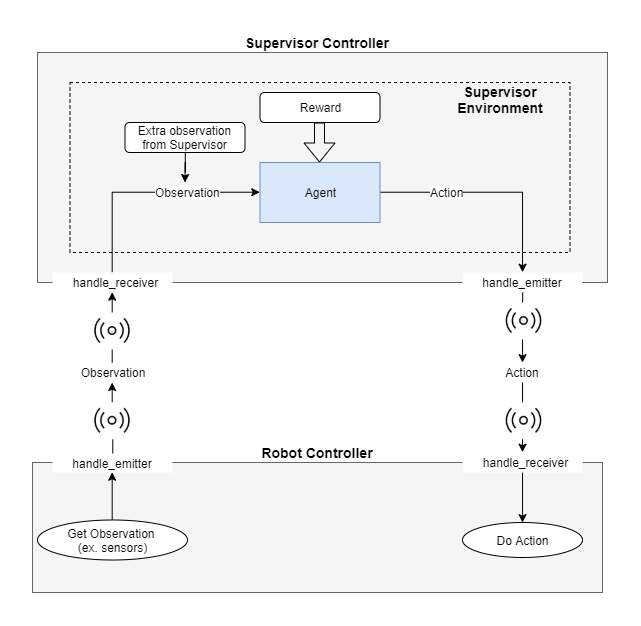
On one hand, the `emitter` is an entity which is provided by Webots, that
broadcasts messages to the world. On the other hand, the `receiver` is an
@@ -114,9 +113,8 @@ You can follow the
`emitter-receiver scheme tutorial `_
to get started and work your way up from there.
-
-
-
+.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots/dev/doc/img/workflow_diagram.png
+ :alt: Workflow diagram
.. _combined:
From 2d104c259057e8cf2e2fe1908185ed5a89bc8dd3 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 20:28:47 +0300
Subject: [PATCH 102/139] Added center align test
---
docs/how_deepbots_works.rst | 3 +++
1 file changed, 3 insertions(+)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index 9654c4b..00bbeb0 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -59,6 +59,7 @@ which returns an initial `observation`."
.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots/dev/doc/img/agent_env_loop.svg
:alt: Agent-environment loop
+ :align: center
Deepbots follows this exact agent-environment loop with the only difference
being that the agent, which is responsible to choose an action, runs on the
@@ -94,6 +95,7 @@ that issue, while being less flexible, which is discussed
.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots/dev/doc/img/deepbots_overview.png
:alt: Deepbots overview
+ :align: center
On one hand, the `emitter` is an entity which is provided by Webots, that
broadcasts messages to the world. On the other hand, the `receiver` is an
@@ -115,6 +117,7 @@ to get started and work your way up from there.
.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots/dev/doc/img/workflow_diagram.png
:alt: Workflow diagram
+ :align: center
.. _combined:
From 8361676541e3531c4ec3446dfdd996f43fe3e6d0 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:25:06 +0300
Subject: [PATCH 103/139] Added copybutton and css
---
docs/_static/css/baselines_theme.css | 63 ++++++++++++++++++++++++++++
docs/conf.py | 6 +++
2 files changed, 69 insertions(+)
create mode 100644 docs/_static/css/baselines_theme.css
diff --git a/docs/_static/css/baselines_theme.css b/docs/_static/css/baselines_theme.css
new file mode 100644
index 0000000..1ce4997
--- /dev/null
+++ b/docs/_static/css/baselines_theme.css
@@ -0,0 +1,63 @@
+/* Taken from https://github.com/DLR-RM/stable-baselines3/blob/master/docs/_static/css/baselines_theme.css */
+
+/* Main colors adapted from pytorch doc */
+:root{
+ --main-bg-color: #343A40;
+ --link-color: #FD7E14;
+}
+
+/* Header fonts y */
+h1, h2, .rst-content .toctree-wrapper p.caption, h3, h4, h5, h6, legend, p.caption {
+ font-family: "Lato","proxima-nova","Helvetica Neue",Arial,sans-serif;
+}
+
+
+/* Docs background */
+.wy-side-nav-search{
+ background-color: var(--main-bg-color);
+}
+
+/* Mobile version */
+.wy-nav-top{
+ background-color: var(--main-bg-color);
+}
+
+/* Change link colors (except for the menu) */
+a {
+ color: var(--link-color);
+}
+
+a:hover {
+ color: #4F778F;
+}
+
+.wy-menu a {
+ color: #b3b3b3;
+}
+
+.wy-menu a:hover {
+ color: #b3b3b3;
+}
+
+a.icon.icon-home {
+ color: #b3b3b3;
+}
+
+.version{
+ color: var(--link-color) !important;
+}
+
+
+/* Make code blocks have a background */
+.codeblock,pre.literal-block,.rst-content .literal-block,.rst-content pre.literal-block,div[class^='highlight'] {
+ background: #f8f8f8;;
+}
+
+/* Change style of types in the docstrings .rst-content .field-list */
+.field-list .xref.py.docutils, .field-list code.docutils, .field-list .docutils.literal.notranslate
+{
+ border: None;
+ padding-left: 0;
+ padding-right: 0;
+ color: #404040;
+}
diff --git a/docs/conf.py b/docs/conf.py
index eaed071..b2199f9 100644
--- a/docs/conf.py
+++ b/docs/conf.py
@@ -31,6 +31,7 @@
"sphinx.ext.autosummary",
'sphinx.ext.viewcode',
"sphinx.ext.intersphinx",
+ "sphinx_copybutton"
]
intersphinx_mapping = {
@@ -56,8 +57,13 @@
# Order class methods on how they appear in the source code
autodoc_member_order = "bysource"
+
# -- Options for HTML output -------------------------------------------------
+def setup(app):
+ app.add_css_file("css/baselines_theme.css")
+
+
# The theme to use for HTML and HTML Help pages. See the documentation for
# a list of builtin themes.
#
From 0dfe946544f944c884a55dee0a5acba02aac30c3 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:25:21 +0300
Subject: [PATCH 104/139] Changed index title
---
docs/index.rst | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/index.rst b/docs/index.rst
index 7680196..d29cbe9 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -1,4 +1,4 @@
-Welcome to **deepbots**' documentation!
+**deepbots** framework docs - Reinforcement Learning in Webots
=======================================
.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots-swag/main/logo/deepbots_full.png
From 9d53eedff8d4396f5ffa2d19389b7e0abb4706c0 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:27:41 +0300
Subject: [PATCH 105/139] Added copybutton requirement
---
docs/requirements.in | 1 +
1 file changed, 1 insertion(+)
diff --git a/docs/requirements.in b/docs/requirements.in
index acbc25d..ba516da 100644
--- a/docs/requirements.in
+++ b/docs/requirements.in
@@ -1,2 +1,3 @@
Sphinx>=5,<6
sphinx_rtd_theme
+sphinx_copybutton
From 3124d3f62c90b468c746bdb132f63d32980b4e2d Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:29:07 +0300
Subject: [PATCH 106/139] Moved copybutton requirement
---
docs/requirements.in | 1 -
docs/requirements.txt | 1 +
2 files changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/requirements.in b/docs/requirements.in
index ba516da..acbc25d 100644
--- a/docs/requirements.in
+++ b/docs/requirements.in
@@ -1,3 +1,2 @@
Sphinx>=5,<6
sphinx_rtd_theme
-sphinx_copybutton
diff --git a/docs/requirements.txt b/docs/requirements.txt
index f047121..293b012 100644
--- a/docs/requirements.txt
+++ b/docs/requirements.txt
@@ -57,4 +57,5 @@ sphinxcontrib-serializinghtml==1.1.5
urllib3==1.26.9
# via requests
setuptools==65.5.0
+sphinx_copybutton
From b1c5eccbe374b8da58da1079870e4b1ff833afa4 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:31:00 +0300
Subject: [PATCH 107/139] Frickin underlines
---
docs/index.rst | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/index.rst b/docs/index.rst
index d29cbe9..d233396 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -1,5 +1,5 @@
**deepbots** framework docs - Reinforcement Learning in Webots
-=======================================
+==============================================================
.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots-swag/main/logo/deepbots_full.png
:alt: Deepbots logo
From 35f6ab109e287bda23eec297ffb6e48d8bc4f231 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:31:11 +0300
Subject: [PATCH 108/139] Overhauled how it works
---
docs/how_deepbots_works.rst | 154 ++++++++++++++++++++----------------
1 file changed, 85 insertions(+), 69 deletions(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index 00bbeb0..da3c92d 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -1,5 +1,5 @@
-How deepbots works
-==================
+How *deepbots* works
+====================
Here you can find a high-level explanation on how the framework is structured
and how it actually works.
@@ -8,50 +8,54 @@ First of all let's set up a simple glossary:
* `World`: Webots uses a tree structure to represent the different entities in
the scene. The World is the root entity which contains all the
- entities/nodes. For example, the world contains the Supervisor and Robot
- entities as well as other objects which might be included in the scene.
+ Webots entities/nodes. For example, the world contains the Supervisor and
+ Robot entities as well as other objects which might be included in the scene.
* `Supervisor`: The Supervisor is an entity which has access to all other
- entities of the world, while having no physical presence in it. For example,
- the Supervisor knows the exact position of all the entities of the world and
- can manipulate them. Additionally, the Supervisor has the Supervisor
- Controller as one of its child nodes.
+ entities of the world, which can have a physical presence or not. For
+ example, the Supervisor knows the exact position of all the entities of the
+ world and can manipulate them.
* `Supervisor Controller`: The Supervisor Controller is a python script which
is responsible for the Supervisor. For example, in the Supervisor Controller
- script the distance between two entities in the world can be calculated.
+ script the distance between two entities in the world can be calculated or
+ entities can be moved around, etc.
* `Robot`: The Robot is an entity that represents a robot in the world. It
- might have sensors and other active components, like motors, etc. as child
- entities. Also, one of its children is the Robot Controller. For example,
- `epuck `_ and
+ might have sensors and other active components, like motors, etc., as child
+ entities. For example, `epuck `_ and
`TIAGo `_ are robots.
* `Robot Controller`: The Robot Controller is a python script which is
responsible for the Robot's movement and sensors. With the Robot Controller
- it is possible to observe the world and act accordingly.
-* `Environment`: The Environment is the interface as described by the OpenAI
- gym. The Environment interface has the following methods:
+ it is possible to observe the world and act accordingly by for example
+ turning the Robot's motors.
+
+* `Environment`: The Environment is the interface as described by
+ The Environment must have the following methods:
* `get_observations()`: Return the observations of the robot. For example,
- metrics from sensors, a camera image etc.
+ metrics from sensors, a camera image, etc.
- * step(action): Each timestep, the agent chooses an action, and the
+ * `step(action)`: In each timestep, the agent chooses an action and the
environment returns the observation, the reward and the state of the
problem (done or not).
* `get_reward(action)`: The reward the agent receives as a result of their
- action.
+ action, based on which it gets trained.
+
* `is_done()`: Whether it’s time to reset the environment. Most (but not all)
tasks are divided up into well-defined episodes, and done being True
- indicates the episode has terminated. For example, if a robot has the task
+ indicates the episode has terminated. For example, if a robot has
to reach a goal, then the done condition might happen when the robot
- "touches" the goal.
- * `reset()`: Used to reset the world to the initial state.
+ "touches" the goal, or when it collides with an obstacle.
+ * `reset()`: Used to reset the world to the initial state and start a new
+ training episode.
-In order to set up a task in Deepbots it is necessary to understand the
-intention of the OpenAI gym environment. According to the OpenAI gym
+
+In order to set up a task in *deepbots* it is necessary to understand the
+intention of the gym environment. According to gym's
documentation, the framework follows the classic “agent-environment loop”.
"Each timestep, the agent chooses an `action`, and the environment returns an
`observation` and a `reward`. The process gets started by calling `reset()`,
@@ -61,34 +65,42 @@ which returns an initial `observation`."
:alt: Agent-environment loop
:align: center
-Deepbots follows this exact agent-environment loop with the only difference
+*Deepbots* follows this exact agent-environment loop with the only difference
being that the agent, which is responsible to choose an action, runs on the
-Supervisor and the observations are acquired by the robot. The goal of the
-deepbots framework is to hide this communication from the user, especially from
-those who are familiar with the OpenAI gym environment. More specifically,
-`SupervisorEnv` is the interface which is used by the Reinforcement Learning
-algorithms and follows the OpenAI Gym environment logic. The Deepbots framework
-provides different levels of abstraction according to the user's needs.
-Moreover, a goal of the framework is to provide different wrappers for a wide
-range of robots.
-
-Deepbots also provides a default implementation of the `reset()` method,
+Supervisor and the observations are acquired by the robot. The goal of
+*deepbots* is to bridge the gap between the gym environment and the Webots
+robot simulator.. More specifically, `DeepbotsSupervisorEnv` is the interface
+which is used by the Reinforcement Learning algorithms and follows gym's
+environment logic. *Deepbots* provides different levels of abstraction
+according to the user's needs. Moreover, the framework provides different
+wrappers for additional functionalities.
+
+*Deepbots* also provides a default implementation of the `reset()` method,
leveraging Webots' built-in simulation reset functions, removing the need for
the user to implement reset procedures for simpler use-cases. It is always
-possible to override this method and implement any custom reset procedure, as
-needed.
+possible to override this method and implement any custom reset procedure as
+needed by the use-case.
+
+*Deepbots* includes two schemes to set up your RL environment, the
+`emitter-receiver scheme` which separates the `Robot` and the `Supervisor` in
+two different entities and the `Robot-Supevisor scheme` which combines them
+into one entity. Both are described below.
Emitter - receiver scheme
-------------------------
-Currently, the communication between the `Supervisor` and the `Robot` is
-achieved via an `emitter` and a `receiver`. Separating the `Supervisor` from
-the `Robot`, deepbots can fit a variety of use-cases, e.g. multiple `Robots`
-collecting experience and a `Supervisor` controlling them with a single agent.
-The way Webots implements `emitter`/`receiver` communication requires messages
-to be packed and unpacked, which introduces an overhead that becomes
-prohibiting in use-cases where the observations are high-dimensional or long,
-such as camera images. Deepbots provides another partially abstract class that
+In this scheme the Robot and the Supervisor are separated into two entities
+within the World. Communication between the two nodes is needed so the
+`Supervisor` can send the agent's actions to the `Robot` and for the `Robot`
+to send back its observations, and can be achieved in various ways.
+The main way communication between the `Supervisor` and the `Robot` is
+achieved is via an `emitter` and a `receiver`. By separating the `Supervisor`
+from the `Robot`, *deepbots* can fit a variety of use-cases, e.g. multiple
+`Robots` collecting experience and a `Supervisor` controlling them with a
+single agent. The way Webots implements `emitter`/`receiver` communication
+requires messages to be packed and unpacked, which introduces an overhead that
+becomes prohibiting in use-cases where the observations are high-dimensional
+or long, such as camera images. *Deepbots* provides another scheme that
combines the `Supervisor` and the `Robot` into one controller and circumvents
that issue, while being less flexible, which is discussed
:ref:`later `.
@@ -101,15 +113,19 @@ On one hand, the `emitter` is an entity which is provided by Webots, that
broadcasts messages to the world. On the other hand, the `receiver` is an
entity that is used to receive messages from the `World`. Consequently, the
agent-environment loop is transformed accordingly. Firstly, the `Robot` uses
-its sensors to retrieve the observation from the `World` and in turn uses the
-`emitter` component to broadcast this observation. Secondly, the `Supervisor`
-receives the observation via the `receiver` component and in turn, the agent
-uses it to choose an action. It should be noted that the observation the agent
-uses might be extended from the `Supervisor`. For example, a model might use
+its sensors to retrieve the observation from the `World` and in turn uses its
+`emitter` component to broadcast it. Secondly, the `Supervisor`
+receives the observation via its `receiver` component and in turn, the agent
+uses it to choose an action. The `Supervisor` uses its `emitter` to broadcast
+the action, which the `Robot` receives with its `receiver`, closing the loop.
+
+It should be noted that the observation the agent
+uses might be extended from the `Supervisor` with additional values that the
+`Robot` might not have access to. For example, a model might use
LiDAR sensors installed on the `Robot`, but also the Euclidean distance between
-the `Robot` and an object. As it is expected, the `Robot` does not know the
-Euclidean distance, only the `Supervisor` can calculate it, because it has
-access to all entities in the `World`.
+the `Robot` and an object. As expected, the `Robot` cannot calculate the
+Euclidean distance, but the `Supervisor` can because it has access to all
+entities in the `World` and consequently their positions..
You can follow the
`emitter-receiver scheme tutorial `_
@@ -128,30 +144,30 @@ As mentioned earlier, in use-cases where the observation transmitted between
the `Robot` and the `Supervisor` is high-dimensional or long, e.g. high
resolution images taken from a camera, a significant overhead is introduced.
This is circumvented by inheriting and implementing the partially abstract
-`RobotSupervisor` that combines the `Robot controller` and the
+`RobotSupervisorEnv` that combines the `Robot controller` and the
`Supervisor Controller` into one, forgoing all `emitter`/`receiver`
communication. This new controller runs on the `Robot`, but requires
-`Supervisor` privileges and is limited to one `Robot`, one `Supervisor`.
+`Supervisor` privileges and is limited to one `Robot` - one `Supervisor`.
You can follow the
`robot-supervisor scheme tutorial `_
-to get started and work your way up from there. We recommended this
-tutorial to get started with deepbots.
+to get started and work your way up from there. We recommend this
+tutorial to get started with *deepbots*.
Abstraction Levels
------------------
-The deepbots framework has been created mostly for educational purposes. The
-aim of the framework is to enable people to use Reinforcement Learning in
-Webots. More specifically, we can consider deepbots as a wrapper of Webots
-exposing an OpenAI gym style interface. For this reason there are multiple
-levels of abstraction. For example, a user can choose if they want to use CSV
-`emitter`/`receiver` or if they want to make an implementation from scratch. In
-the top level of the abstraction hierarchy is the `SupervisorEnv` which is the
-OpenAI gym interface. Below that level there are partially implemented classes
+The *deepbots* framework has been created mostly for educational and
+research purposes. The aim of the framework is to enable people to use
+Reinforcement Learning in Webots. More specifically, we can consider *deepbots*
+as a wrapper of Webots exposing a gym-style interface. For this reason there
+are multiple levels of abstraction via a family of classes. For example, a user
+can choose if they want to use a CSV `emitter`/`receiver` or if they want to
+make a communication implementation from scratch. In the top level of the
+abstraction hierarchy is the `DeepbotsSupervisorEnv` which is the
+gym interface. Below that level there are partially implemented classes
with common functionality. These implementations aim to hide the communication
-between the `Supervisor` and the `Robot`, as described in the two different
-schemes earlier. Similarly, in the `emitter`/`receiver` scheme the `Robot` also
-has different abstraction levels. According to their needs, users can choose
-either to process the messages received from the `Supervisor` themselves or use
-the existing implementations.
\ No newline at end of file
+between the `Supervisor` and the `Robot` and other various functions needed by
+the simulator for a gym environment to work, as described in the two different
+schemes earlier. Users are free to create their own classes inheriting from
+whichever *deepbots* class they choose and customize according to their needs.
\ No newline at end of file
From 1606ce0774fe528985be2b2b40ae444878de68d4 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:38:24 +0300
Subject: [PATCH 109/139] Some fixes and trying out link to code
---
docs/how_deepbots_works.rst | 17 +++++++++--------
1 file changed, 9 insertions(+), 8 deletions(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index da3c92d..f7d61ed 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -67,13 +67,14 @@ which returns an initial `observation`."
*Deepbots* follows this exact agent-environment loop with the only difference
being that the agent, which is responsible to choose an action, runs on the
-Supervisor and the observations are acquired by the robot. The goal of
+`Supervisor` and the observations are acquired by the `Robot`. The goal of
*deepbots* is to bridge the gap between the gym environment and the Webots
-robot simulator.. More specifically, `DeepbotsSupervisorEnv` is the interface
-which is used by the Reinforcement Learning algorithms and follows gym's
-environment logic. *Deepbots* provides different levels of abstraction
-according to the user's needs. Moreover, the framework provides different
-wrappers for additional functionalities.
+robot simulator. More specifically,
+:ref:`DeepbotsSupervisorEnv `
+is the interface which is used by the Reinforcement Learning algorithms and
+follows gym's environment logic. *Deepbots* provides different levels of
+abstraction according to the user's needs. Moreover, the framework provides
+different wrappers for additional functionalities.
*Deepbots* also provides a default implementation of the `reset()` method,
leveraging Webots' built-in simulation reset functions, removing the need for
@@ -144,9 +145,9 @@ As mentioned earlier, in use-cases where the observation transmitted between
the `Robot` and the `Supervisor` is high-dimensional or long, e.g. high
resolution images taken from a camera, a significant overhead is introduced.
This is circumvented by inheriting and implementing the partially abstract
-`RobotSupervisorEnv` that combines the `Robot controller` and the
+`RobotSupervisorEnv` that combines the `Robot Controller` and the
`Supervisor Controller` into one, forgoing all `emitter`/`receiver`
-communication. This new controller runs on the `Robot`, but requires
+communication. This controller runs on the `Robot`, but requires
`Supervisor` privileges and is limited to one `Robot` - one `Supervisor`.
You can follow the
From 288a6c5f583fb3446c71f04f1562dc50c913a0bd Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:41:41 +0300
Subject: [PATCH 110/139] Added link tags
---
docs/deepbots/deepbots.robots.controllers.rst | 4 ++++
docs/deepbots/deepbots.supervisor.controllers.rst | 8 ++++++++
docs/deepbots/deepbots.supervisor.wrappers.rst | 4 ++++
docs/how_deepbots_works.rst | 2 +-
4 files changed, 17 insertions(+), 1 deletion(-)
diff --git a/docs/deepbots/deepbots.robots.controllers.rst b/docs/deepbots/deepbots.robots.controllers.rst
index 004d973..b3b5071 100644
--- a/docs/deepbots/deepbots.robots.controllers.rst
+++ b/docs/deepbots/deepbots.robots.controllers.rst
@@ -1,11 +1,15 @@
deepbots.robots.controllers
===========================
+.. _emitterreceiverrobot:
+
.. autoclass:: deepbots.robots.EmitterReceiverRobot
:members:
:undoc-members:
:show-inheritance:
+.. _csvrobot:
+
.. autoclass:: deepbots.robots.CSVRobot
:members:
:undoc-members:
diff --git a/docs/deepbots/deepbots.supervisor.controllers.rst b/docs/deepbots/deepbots.supervisor.controllers.rst
index 4020b1e..f0a3aab 100644
--- a/docs/deepbots/deepbots.supervisor.controllers.rst
+++ b/docs/deepbots/deepbots.supervisor.controllers.rst
@@ -1,21 +1,29 @@
deepbots.supervisor.controllers
===============================
+.. _deepbotssupervisorenv:
+
.. autoclass:: deepbots.supervisor.DeepbotsSupervisorEnv
:members:
:undoc-members:
:show-inheritance:
+.. _robotsupervisorenv:
+
.. autoclass:: deepbots.supervisor.RobotSupervisorEnv
:members:
:undoc-members:
:show-inheritance:
+.. _emitterreceiversupervisorenv:
+
.. autoclass:: deepbots.supervisor.EmitterReceiverSupervisorEnv
:members:
:undoc-members:
:show-inheritance:
+.. _csvsupervisorenv:
+
.. autoclass:: deepbots.supervisor.CSVSupervisorEnv
:members:
:undoc-members:
diff --git a/docs/deepbots/deepbots.supervisor.wrappers.rst b/docs/deepbots/deepbots.supervisor.wrappers.rst
index aa990c6..1bd6feb 100644
--- a/docs/deepbots/deepbots.supervisor.wrappers.rst
+++ b/docs/deepbots/deepbots.supervisor.wrappers.rst
@@ -1,11 +1,15 @@
deepbots.supervisor.wrappers
============================
+.. _keyboardprinter:
+
.. autoclass:: deepbots.supervisor.wrappers.keyboard_printer.KeyboardPrinter
:members:
:undoc-members:
:show-inheritance:
+.. _tensorboardlogger:
+
.. autoclass:: deepbots.supervisor.wrappers.tensorboard_wrapper.TensorboardLogger
:members:
:undoc-members:
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index f7d61ed..97cc3ba 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -70,7 +70,7 @@ being that the agent, which is responsible to choose an action, runs on the
`Supervisor` and the observations are acquired by the `Robot`. The goal of
*deepbots* is to bridge the gap between the gym environment and the Webots
robot simulator. More specifically,
-:ref:`DeepbotsSupervisorEnv `
+:ref:`DeepbotsSupervisorEnv `
is the interface which is used by the Reinforcement Learning algorithms and
follows gym's environment logic. *Deepbots* provides different levels of
abstraction according to the user's needs. Moreover, the framework provides
From cbdd445fb3e16fb2ff2b19586b4926455aa0196f Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:43:16 +0300
Subject: [PATCH 111/139] Added underscore, kinda hate you rst
---
docs/how_deepbots_works.rst | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index 97cc3ba..acd5c3d 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -70,7 +70,7 @@ being that the agent, which is responsible to choose an action, runs on the
`Supervisor` and the observations are acquired by the `Robot`. The goal of
*deepbots* is to bridge the gap between the gym environment and the Webots
robot simulator. More specifically,
-:ref:`DeepbotsSupervisorEnv `
+:ref:`DeepbotsSupervisorEnv `
is the interface which is used by the Reinforcement Learning algorithms and
follows gym's environment logic. *Deepbots* provides different levels of
abstraction according to the user's needs. Moreover, the framework provides
From bd03dfbc8125c706dd992fd01209a7f45c35d27f Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:46:20 +0300
Subject: [PATCH 112/139] Some more juggling
---
docs/how_deepbots_works.rst | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index acd5c3d..a564950 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -70,7 +70,7 @@ being that the agent, which is responsible to choose an action, runs on the
`Supervisor` and the observations are acquired by the `Robot`. The goal of
*deepbots* is to bridge the gap between the gym environment and the Webots
robot simulator. More specifically,
-:ref:`DeepbotsSupervisorEnv `
+:ref:`DeepbotsSupervisorEnv`
is the interface which is used by the Reinforcement Learning algorithms and
follows gym's environment logic. *Deepbots* provides different levels of
abstraction according to the user's needs. Moreover, the framework provides
From d5cab70b3c9e603a1b46cf9d896ba6029d867819 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 21:49:39 +0300
Subject: [PATCH 113/139] trying py meth wizardry
---
docs/how_deepbots_works.rst | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index a564950..d6cf3fa 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -70,7 +70,7 @@ being that the agent, which is responsible to choose an action, runs on the
`Supervisor` and the observations are acquired by the `Robot`. The goal of
*deepbots* is to bridge the gap between the gym environment and the Webots
robot simulator. More specifically,
-:ref:`DeepbotsSupervisorEnv`
+:py:meth:`deepbots.supervisor.DeepbotsSupervisorEnv`
is the interface which is used by the Reinforcement Learning algorithms and
follows gym's environment logic. *Deepbots* provides different levels of
abstraction according to the user's needs. Moreover, the framework provides
From 0c9c577587a912f083d7c7f472d005b26b49b568 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 22:10:11 +0300
Subject: [PATCH 114/139] Removed unneeded anchors for classes
---
docs/deepbots/deepbots.robots.controllers.rst | 4 ----
docs/deepbots/deepbots.supervisor.controllers.rst | 8 --------
docs/deepbots/deepbots.supervisor.wrappers.rst | 4 ----
3 files changed, 16 deletions(-)
diff --git a/docs/deepbots/deepbots.robots.controllers.rst b/docs/deepbots/deepbots.robots.controllers.rst
index b3b5071..004d973 100644
--- a/docs/deepbots/deepbots.robots.controllers.rst
+++ b/docs/deepbots/deepbots.robots.controllers.rst
@@ -1,15 +1,11 @@
deepbots.robots.controllers
===========================
-.. _emitterreceiverrobot:
-
.. autoclass:: deepbots.robots.EmitterReceiverRobot
:members:
:undoc-members:
:show-inheritance:
-.. _csvrobot:
-
.. autoclass:: deepbots.robots.CSVRobot
:members:
:undoc-members:
diff --git a/docs/deepbots/deepbots.supervisor.controllers.rst b/docs/deepbots/deepbots.supervisor.controllers.rst
index f0a3aab..4020b1e 100644
--- a/docs/deepbots/deepbots.supervisor.controllers.rst
+++ b/docs/deepbots/deepbots.supervisor.controllers.rst
@@ -1,29 +1,21 @@
deepbots.supervisor.controllers
===============================
-.. _deepbotssupervisorenv:
-
.. autoclass:: deepbots.supervisor.DeepbotsSupervisorEnv
:members:
:undoc-members:
:show-inheritance:
-.. _robotsupervisorenv:
-
.. autoclass:: deepbots.supervisor.RobotSupervisorEnv
:members:
:undoc-members:
:show-inheritance:
-.. _emitterreceiversupervisorenv:
-
.. autoclass:: deepbots.supervisor.EmitterReceiverSupervisorEnv
:members:
:undoc-members:
:show-inheritance:
-.. _csvsupervisorenv:
-
.. autoclass:: deepbots.supervisor.CSVSupervisorEnv
:members:
:undoc-members:
diff --git a/docs/deepbots/deepbots.supervisor.wrappers.rst b/docs/deepbots/deepbots.supervisor.wrappers.rst
index 1bd6feb..aa990c6 100644
--- a/docs/deepbots/deepbots.supervisor.wrappers.rst
+++ b/docs/deepbots/deepbots.supervisor.wrappers.rst
@@ -1,15 +1,11 @@
deepbots.supervisor.wrappers
============================
-.. _keyboardprinter:
-
.. autoclass:: deepbots.supervisor.wrappers.keyboard_printer.KeyboardPrinter
:members:
:undoc-members:
:show-inheritance:
-.. _tensorboardlogger:
-
.. autoclass:: deepbots.supervisor.wrappers.tensorboard_wrapper.TensorboardLogger
:members:
:undoc-members:
From 1b7642b9dcc7fa1599a98685eb2869648ed60958 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 22:10:25 +0300
Subject: [PATCH 115/139] Additions and fixes for how it works
---
docs/how_deepbots_works.rst | 48 ++++++++++++++++++++++++++-----------
1 file changed, 34 insertions(+), 14 deletions(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index d6cf3fa..39dfda6 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -2,7 +2,9 @@ How *deepbots* works
====================
Here you can find a high-level explanation on how the framework is structured
-and how it actually works.
+and how it actually works. Read on if you want to dig deeper into how and why
+*deepbots* works the way it does. If you want a quick start, visit our
+`beginner tutorial `_!
First of all let's set up a simple glossary:
@@ -70,9 +72,9 @@ being that the agent, which is responsible to choose an action, runs on the
`Supervisor` and the observations are acquired by the `Robot`. The goal of
*deepbots* is to bridge the gap between the gym environment and the Webots
robot simulator. More specifically,
-:py:meth:`deepbots.supervisor.DeepbotsSupervisorEnv`
-is the interface which is used by the Reinforcement Learning algorithms and
-follows gym's environment logic. *Deepbots* provides different levels of
+:py:meth:`deepbots.supervisor.DeepbotsSupervisorEnv` is the main class that
+provides the interface which is used by the Reinforcement Learning algorithms
+and follows gym's environment logic. *Deepbots* provides different levels of
abstraction according to the user's needs. Moreover, the framework provides
different wrappers for additional functionalities.
@@ -82,6 +84,13 @@ the user to implement reset procedures for simpler use-cases. It is always
possible to override this method and implement any custom reset procedure as
needed by the use-case.
+**All-in-all to set up your gym environment you have to create a class that
+inherits one of deepbot's classes and implement the methods that are specific
+to your use-case and deepbots handles interfacing the environment with
+Webots. As your familiarity and/or needs grow, you can override deepbot's
+methods to alter functionality or inherit from classes higher up in the
+hierarchy.**
+
*Deepbots* includes two schemes to set up your RL environment, the
`emitter-receiver scheme` which separates the `Robot` and the `Supervisor` in
two different entities and the `Robot-Supevisor scheme` which combines them
@@ -95,7 +104,7 @@ within the World. Communication between the two nodes is needed so the
`Supervisor` can send the agent's actions to the `Robot` and for the `Robot`
to send back its observations, and can be achieved in various ways.
The main way communication between the `Supervisor` and the `Robot` is
-achieved is via an `emitter` and a `receiver`. By separating the `Supervisor`
+achieved is via `emitters` and `receivers`. By separating the `Supervisor`
from the `Robot`, *deepbots* can fit a variety of use-cases, e.g. multiple
`Robots` collecting experience and a `Supervisor` controlling them with a
single agent. The way Webots implements `emitter`/`receiver` communication
@@ -121,12 +130,18 @@ uses it to choose an action. The `Supervisor` uses its `emitter` to broadcast
the action, which the `Robot` receives with its `receiver`, closing the loop.
It should be noted that the observation the agent
-uses might be extended from the `Supervisor` with additional values that the
-`Robot` might not have access to. For example, a model might use
-LiDAR sensors installed on the `Robot`, but also the Euclidean distance between
-the `Robot` and an object. As expected, the `Robot` cannot calculate the
-Euclidean distance, but the `Supervisor` can because it has access to all
-entities in the `World` and consequently their positions..
+uses might be extended in the `Supervisor` with additional values that the
+`Robot` might not have access to. For example, an observation might include
+LiDAR sensors values taken from the `Robot`, but also the Euclidean distance
+between the `Robot` and an object. As expected, the `Robot` cannot calculate
+the Euclidean distance, but the `Supervisor` can, because it has access to all
+entities in the `World` and their positions.
+
+You can take a look at the `Supervisor` and `Robot` classes implementations for
+this scheme in :py:meth:`deepbots.supervisor.EmitterReceiverSupervisorEnv`/
+:py:meth:`deepbots.supervisor.CSVSupervisorEnv` and
+:py:meth:`deepbots.robots.EmitterReceiverRobot`/:py:meth:`deepbots.robots.CSVRobot`
+respectively.
You can follow the
`emitter-receiver scheme tutorial `_
@@ -150,10 +165,15 @@ This is circumvented by inheriting and implementing the partially abstract
communication. This controller runs on the `Robot`, but requires
`Supervisor` privileges and is limited to one `Robot` - one `Supervisor`.
+You can take a look at the combined `Robot - Supervisor` environment class in
+:py:meth:`deepbots.supervisor.RobotSupervisorEnv`, which acts both as the
+`Robot Controller`/`Supervisor Controller` and the `Environment` the RL agent
+interacts with.
+
You can follow the
`robot-supervisor scheme tutorial `_
-to get started and work your way up from there. We recommend this
-tutorial to get started with *deepbots*.
+to get started and work your way up from there. *We recommend this
+scheme/tutorial to get started with deepbots*.
Abstraction Levels
------------------
@@ -165,7 +185,7 @@ as a wrapper of Webots exposing a gym-style interface. For this reason there
are multiple levels of abstraction via a family of classes. For example, a user
can choose if they want to use a CSV `emitter`/`receiver` or if they want to
make a communication implementation from scratch. In the top level of the
-abstraction hierarchy is the `DeepbotsSupervisorEnv` which is the
+abstraction hierarchy is the `DeepbotsSupervisorEnv` class which is the main
gym interface. Below that level there are partially implemented classes
with common functionality. These implementations aim to hide the communication
between the `Supervisor` and the `Robot` and other various functions needed by
From 2e624ce41a96fe745b49bfd4b5f52b83a4cf655d Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 22:14:05 +0300
Subject: [PATCH 116/139] Moved development note higher up
---
docs/index.rst | 8 ++++----
1 file changed, 4 insertions(+), 4 deletions(-)
diff --git a/docs/index.rst b/docs/index.rst
index d233396..96f05ca 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -4,6 +4,10 @@
.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots-swag/main/logo/deepbots_full.png
:alt: Deepbots logo
+.. note::
+
+ The documentation site is under active development.
+
`Deepbots `_ is a simple framework
which is used as "middleware" between the free and open-source
`Cyberbotics' Webots `_ robot simulator
@@ -15,10 +19,6 @@ as the most used interface between the actual application and the RL algorithm.
gap between the gym environment and the simulator to enable you to easily
create custom RL environments in Webots.**
-.. note::
-
- The documentation site is under active development.
-
Contents
--------
From 25ad7be7ad2669a8f5aaf0788203ebfcc90e4790 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 22:14:36 +0300
Subject: [PATCH 117/139] Capitalized title
---
docs/index.rst | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/index.rst b/docs/index.rst
index 96f05ca..4514b1d 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -1,4 +1,4 @@
-**deepbots** framework docs - Reinforcement Learning in Webots
+**Deepbots** framework docs - Reinforcement Learning in Webots
==============================================================
.. image:: https://raw.githubusercontent.com/aidudezzz/deepbots-swag/main/logo/deepbots_full.png
From 7df4c1963a4e0e7a12768c54fea9074b404749c0 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 22:48:00 +0300
Subject: [PATCH 118/139] More updates in how it works
---
docs/how_deepbots_works.rst | 35 +++++++++++++++++++++++++----------
1 file changed, 25 insertions(+), 10 deletions(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index 39dfda6..5c083cf 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -2,9 +2,15 @@ How *deepbots* works
====================
Here you can find a high-level explanation on how the framework is structured
-and how it actually works. Read on if you want to dig deeper into how and why
-*deepbots* works the way it does. If you want a quick start, visit our
-`beginner tutorial `_!
+and how it actually works.
+
+*Read on if you want to dig deeper into how and why
+deepbots works the way it does. If you want a quick start, visit our
+`beginner tutorial `_*
+and if you want to see *deepbots* in action, visit `deepworlds `_!
+
+Overview
+========
First of all let's set up a simple glossary:
@@ -75,8 +81,8 @@ robot simulator. More specifically,
:py:meth:`deepbots.supervisor.DeepbotsSupervisorEnv` is the main class that
provides the interface which is used by the Reinforcement Learning algorithms
and follows gym's environment logic. *Deepbots* provides different levels of
-abstraction according to the user's needs. Moreover, the framework provides
-different wrappers for additional functionalities.
+abstraction to be used according to the user's needs. Moreover, the framework
+provides different wrappers for additional functionalities.
*Deepbots* also provides a default implementation of the `reset()` method,
leveraging Webots' built-in simulation reset functions, removing the need for
@@ -91,6 +97,14 @@ Webots. As your familiarity and/or needs grow, you can override deepbot's
methods to alter functionality or inherit from classes higher up in the
hierarchy.**
+*Deepbots* targets users that are unfamiliar with either Webots or
+gym environments or both. If you have a strong understanding of both, you can
+forgo using *deepbots* altogether, but if you chose otherwise, it can make
+your code more modular and clean.
+
+The two *deepbots* schemes
+==========================
+
*Deepbots* includes two schemes to set up your RL environment, the
`emitter-receiver scheme` which separates the `Robot` and the `Supervisor` in
two different entities and the `Robot-Supevisor scheme` which combines them
@@ -172,11 +186,11 @@ interacts with.
You can follow the
`robot-supervisor scheme tutorial `_
-to get started and work your way up from there. *We recommend this
-scheme/tutorial to get started with deepbots*.
+to get started and work your way up from there. **We recommend this
+scheme/tutorial to get started with deepbots.**
Abstraction Levels
-------------------
+==================
The *deepbots* framework has been created mostly for educational and
research purposes. The aim of the framework is to enable people to use
@@ -190,5 +204,6 @@ gym interface. Below that level there are partially implemented classes
with common functionality. These implementations aim to hide the communication
between the `Supervisor` and the `Robot` and other various functions needed by
the simulator for a gym environment to work, as described in the two different
-schemes earlier. Users are free to create their own classes inheriting from
-whichever *deepbots* class they choose and customize according to their needs.
\ No newline at end of file
+schemes earlier. Feel free to explore the documentation and the full family
+of classes and to create and customize your own, inheriting from whichever
+*deepbots* class you choose according to your needs.
\ No newline at end of file
From 6563b85983244b56bc36f2fb33f24c1b15b284f7 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:09:49 +0300
Subject: [PATCH 119/139] Some more fixes and proper subsections
---
docs/how_deepbots_works.rst | 28 ++++++++++++++--------------
1 file changed, 14 insertions(+), 14 deletions(-)
diff --git a/docs/how_deepbots_works.rst b/docs/how_deepbots_works.rst
index 5c083cf..55e711b 100644
--- a/docs/how_deepbots_works.rst
+++ b/docs/how_deepbots_works.rst
@@ -4,13 +4,13 @@ How *deepbots* works
Here you can find a high-level explanation on how the framework is structured
and how it actually works.
-*Read on if you want to dig deeper into how and why
-deepbots works the way it does. If you want a quick start, visit our
-`beginner tutorial `_*
+**Read on if you want to dig deeper into how and why
+deepbots works the way it does. If you want a quick start, visit our**
+`beginner tutorial `_
and if you want to see *deepbots* in action, visit `deepworlds `_!
Overview
-========
+--------
First of all let's set up a simple glossary:
@@ -91,9 +91,9 @@ possible to override this method and implement any custom reset procedure as
needed by the use-case.
**All-in-all to set up your gym environment you have to create a class that
-inherits one of deepbot's classes and implement the methods that are specific
-to your use-case and deepbots handles interfacing the environment with
-Webots. As your familiarity and/or needs grow, you can override deepbot's
+inherits one of deepbots' classes and implement the methods that are specific
+to your use-case and deepbots will handle interfacing the environment with
+Webots. As your familiarity and/or needs grow, you can override deepbots'
methods to alter functionality or inherit from classes higher up in the
hierarchy.**
@@ -103,7 +103,7 @@ forgo using *deepbots* altogether, but if you chose otherwise, it can make
your code more modular and clean.
The two *deepbots* schemes
-==========================
+--------------------------
*Deepbots* includes two schemes to set up your RL environment, the
`emitter-receiver scheme` which separates the `Robot` and the `Supervisor` in
@@ -111,14 +111,14 @@ two different entities and the `Robot-Supevisor scheme` which combines them
into one entity. Both are described below.
Emitter - receiver scheme
--------------------------
+^^^^^^^^^^^^^^^^^^^^^^^^^
-In this scheme the Robot and the Supervisor are separated into two entities
+In this scheme the `Robot` and the `Supervisor` are separated into two entities
within the World. Communication between the two nodes is needed so the
`Supervisor` can send the agent's actions to the `Robot` and for the `Robot`
to send back its observations, and can be achieved in various ways.
The main way communication between the `Supervisor` and the `Robot` is
-achieved is via `emitters` and `receivers`. By separating the `Supervisor`
+achieved, is via `emitters` and `receivers`. By separating the `Supervisor`
from the `Robot`, *deepbots* can fit a variety of use-cases, e.g. multiple
`Robots` collecting experience and a `Supervisor` controlling them with a
single agent. The way Webots implements `emitter`/`receiver` communication
@@ -168,7 +168,7 @@ to get started and work your way up from there.
.. _combined:
Combined Robot-Supervisor scheme
---------------------------------
+^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
As mentioned earlier, in use-cases where the observation transmitted between
the `Robot` and the `Supervisor` is high-dimensional or long, e.g. high
@@ -185,12 +185,12 @@ You can take a look at the combined `Robot - Supervisor` environment class in
interacts with.
You can follow the
-`robot-supervisor scheme tutorial `_
+`robot-supervisor scheme tutorial `_
to get started and work your way up from there. **We recommend this
scheme/tutorial to get started with deepbots.**
Abstraction Levels
-==================
+------------------
The *deepbots* framework has been created mostly for educational and
research purposes. The aim of the framework is to enable people to use
From 5610bde7292963f1ba6b642ea4a209110f2d8cb1 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:17:07 +0300
Subject: [PATCH 120/139] Added modules
---
docs/modules.rst | 7 +++++++
1 file changed, 7 insertions(+)
create mode 100644 docs/modules.rst
diff --git a/docs/modules.rst b/docs/modules.rst
new file mode 100644
index 0000000..846aa79
--- /dev/null
+++ b/docs/modules.rst
@@ -0,0 +1,7 @@
+deepbots
+========
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots
From 85142a71d3be2a579004fc71e2f68b2170c8f716 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:30:41 +0300
Subject: [PATCH 121/139] Trying out additional path insertion
---
docs/conf.py | 1 +
1 file changed, 1 insertion(+)
diff --git a/docs/conf.py b/docs/conf.py
index b2199f9..b7d0b12 100644
--- a/docs/conf.py
+++ b/docs/conf.py
@@ -14,6 +14,7 @@
import sys
sys.path.insert(0, os.path.abspath('..'))
+sys.path.insert(0, os.path.abspath('../deepbots'))
# -- Project information -----------------------------------------------------
From 4000c10a0fb3af13b883c5795ce733056dfe8691 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:30:47 +0300
Subject: [PATCH 122/139] Removed search ref
---
docs/index.rst | 1 -
1 file changed, 1 deletion(-)
diff --git a/docs/index.rst b/docs/index.rst
index 4514b1d..ee0a24f 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -80,5 +80,4 @@ Indices and tables
-------------------
* :ref:`genindex`
-* :ref:`search`
* :ref:`modindex`
\ No newline at end of file
From eee6fb1e347dfb2cb96618751cf04f527b878e33 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:32:31 +0300
Subject: [PATCH 123/139] TWO BIRDS IN ONE STONE HYPE?
---
docs/index.rst | 1 +
docs/modules.rst | 2 +-
2 files changed, 2 insertions(+), 1 deletion(-)
diff --git a/docs/index.rst b/docs/index.rst
index ee0a24f..a5b3afb 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -35,6 +35,7 @@ Contents
:caption: Reference
deepbots/deepbots
+ modules
Official resources
------------------
diff --git a/docs/modules.rst b/docs/modules.rst
index 846aa79..52008a4 100644
--- a/docs/modules.rst
+++ b/docs/modules.rst
@@ -4,4 +4,4 @@ deepbots
.. toctree::
:maxdepth: 4
- deepbots
+ deepbots/deepbots
From 5e12119f4b435c31e635f46cb819153d3c1473a8 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:39:43 +0300
Subject: [PATCH 124/139] Removed useless module.rst and added modindex
directive (WTH?)
---
docs/index.rst | 4 +++-
docs/modules.rst | 7 -------
2 files changed, 3 insertions(+), 8 deletions(-)
delete mode 100644 docs/modules.rst
diff --git a/docs/index.rst b/docs/index.rst
index a5b3afb..f9d9e59 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -81,4 +81,6 @@ Indices and tables
-------------------
* :ref:`genindex`
-* :ref:`modindex`
\ No newline at end of file
+* :ref:`modindex`
+
+:modindex:
diff --git a/docs/modules.rst b/docs/modules.rst
deleted file mode 100644
index 52008a4..0000000
--- a/docs/modules.rst
+++ /dev/null
@@ -1,7 +0,0 @@
-deepbots
-========
-
-.. toctree::
- :maxdepth: 4
-
- deepbots/deepbots
From 5d90250117560097308a78a5872baac66233d5c1 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:41:08 +0300
Subject: [PATCH 125/139] Frickin hell
---
docs/index.rst | 1 -
1 file changed, 1 deletion(-)
diff --git a/docs/index.rst b/docs/index.rst
index f9d9e59..df33a66 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -35,7 +35,6 @@ Contents
:caption: Reference
deepbots/deepbots
- modules
Official resources
------------------
From e6627c41bf25335c4756dcfb77c2b64c7ecd15e1 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:44:51 +0300
Subject: [PATCH 126/139] Adding generated stuff to test
---
docs/source/deepbots.robots.controllers.rst | 29 ++++++++++++
docs/source/deepbots.robots.rst | 18 ++++++++
docs/source/deepbots.rst | 19 ++++++++
.../deepbots.supervisor.controllers.rst | 45 +++++++++++++++++++
docs/source/deepbots.supervisor.rst | 19 ++++++++
docs/source/deepbots.supervisor.wrappers.rst | 29 ++++++++++++
docs/source/modules.rst | 7 +++
7 files changed, 166 insertions(+)
create mode 100644 docs/source/deepbots.robots.controllers.rst
create mode 100644 docs/source/deepbots.robots.rst
create mode 100644 docs/source/deepbots.rst
create mode 100644 docs/source/deepbots.supervisor.controllers.rst
create mode 100644 docs/source/deepbots.supervisor.rst
create mode 100644 docs/source/deepbots.supervisor.wrappers.rst
create mode 100644 docs/source/modules.rst
diff --git a/docs/source/deepbots.robots.controllers.rst b/docs/source/deepbots.robots.controllers.rst
new file mode 100644
index 0000000..94ae06a
--- /dev/null
+++ b/docs/source/deepbots.robots.controllers.rst
@@ -0,0 +1,29 @@
+deepbots.robots.controllers package
+===================================
+
+Submodules
+----------
+
+deepbots.robots.controllers.csv\_robot module
+---------------------------------------------
+
+.. automodule:: deepbots.robots.controllers.csv_robot
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.robots.controllers.emitter\_receiver\_robot module
+-----------------------------------------------------------
+
+.. automodule:: deepbots.robots.controllers.emitter_receiver_robot
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Module contents
+---------------
+
+.. automodule:: deepbots.robots.controllers
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.robots.rst b/docs/source/deepbots.robots.rst
new file mode 100644
index 0000000..491c017
--- /dev/null
+++ b/docs/source/deepbots.robots.rst
@@ -0,0 +1,18 @@
+deepbots.robots package
+=======================
+
+Subpackages
+-----------
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots.robots.controllers
+
+Module contents
+---------------
+
+.. automodule:: deepbots.robots
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.rst b/docs/source/deepbots.rst
new file mode 100644
index 0000000..b1aa46d
--- /dev/null
+++ b/docs/source/deepbots.rst
@@ -0,0 +1,19 @@
+deepbots package
+================
+
+Subpackages
+-----------
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots.robots
+ deepbots.supervisor
+
+Module contents
+---------------
+
+.. automodule:: deepbots
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.controllers.rst b/docs/source/deepbots.supervisor.controllers.rst
new file mode 100644
index 0000000..ff5ff46ab
--- /dev/null
+++ b/docs/source/deepbots.supervisor.controllers.rst
@@ -0,0 +1,45 @@
+deepbots.supervisor.controllers package
+=======================================
+
+Submodules
+----------
+
+deepbots.supervisor.controllers.csv\_supervisor\_env module
+-----------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.csv_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.controllers.deepbots\_supervisor\_env module
+----------------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.deepbots_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.controllers.emitter\_receiver\_supervisor\_env module
+-------------------------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.emitter_receiver_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.controllers.robot\_supervisor\_env module
+-------------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.robot_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Module contents
+---------------
+
+.. automodule:: deepbots.supervisor.controllers
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.rst b/docs/source/deepbots.supervisor.rst
new file mode 100644
index 0000000..43253a5
--- /dev/null
+++ b/docs/source/deepbots.supervisor.rst
@@ -0,0 +1,19 @@
+deepbots.supervisor package
+===========================
+
+Subpackages
+-----------
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots.supervisor.controllers
+ deepbots.supervisor.wrappers
+
+Module contents
+---------------
+
+.. automodule:: deepbots.supervisor
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.wrappers.rst b/docs/source/deepbots.supervisor.wrappers.rst
new file mode 100644
index 0000000..2e48902
--- /dev/null
+++ b/docs/source/deepbots.supervisor.wrappers.rst
@@ -0,0 +1,29 @@
+deepbots.supervisor.wrappers package
+====================================
+
+Submodules
+----------
+
+deepbots.supervisor.wrappers.keyboard\_printer module
+-----------------------------------------------------
+
+.. automodule:: deepbots.supervisor.wrappers.keyboard_printer
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.wrappers.tensorboard\_wrapper module
+--------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.wrappers.tensorboard_wrapper
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Module contents
+---------------
+
+.. automodule:: deepbots.supervisor.wrappers
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/modules.rst b/docs/source/modules.rst
new file mode 100644
index 0000000..846aa79
--- /dev/null
+++ b/docs/source/modules.rst
@@ -0,0 +1,7 @@
+deepbots
+========
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots
From b80b4325733375e25042b32106778616be3c2b83 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:52:42 +0300
Subject: [PATCH 127/139] Removed em
---
docs/source/deepbots.robots.controllers.rst | 29 ------------
docs/source/deepbots.robots.rst | 18 --------
docs/source/deepbots.rst | 19 --------
.../deepbots.supervisor.controllers.rst | 45 -------------------
docs/source/deepbots.supervisor.rst | 19 --------
docs/source/deepbots.supervisor.wrappers.rst | 29 ------------
docs/source/modules.rst | 7 ---
7 files changed, 166 deletions(-)
delete mode 100644 docs/source/deepbots.robots.controllers.rst
delete mode 100644 docs/source/deepbots.robots.rst
delete mode 100644 docs/source/deepbots.rst
delete mode 100644 docs/source/deepbots.supervisor.controllers.rst
delete mode 100644 docs/source/deepbots.supervisor.rst
delete mode 100644 docs/source/deepbots.supervisor.wrappers.rst
delete mode 100644 docs/source/modules.rst
diff --git a/docs/source/deepbots.robots.controllers.rst b/docs/source/deepbots.robots.controllers.rst
deleted file mode 100644
index 94ae06a..0000000
--- a/docs/source/deepbots.robots.controllers.rst
+++ /dev/null
@@ -1,29 +0,0 @@
-deepbots.robots.controllers package
-===================================
-
-Submodules
-----------
-
-deepbots.robots.controllers.csv\_robot module
----------------------------------------------
-
-.. automodule:: deepbots.robots.controllers.csv_robot
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.robots.controllers.emitter\_receiver\_robot module
------------------------------------------------------------
-
-.. automodule:: deepbots.robots.controllers.emitter_receiver_robot
- :members:
- :undoc-members:
- :show-inheritance:
-
-Module contents
----------------
-
-.. automodule:: deepbots.robots.controllers
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docs/source/deepbots.robots.rst b/docs/source/deepbots.robots.rst
deleted file mode 100644
index 491c017..0000000
--- a/docs/source/deepbots.robots.rst
+++ /dev/null
@@ -1,18 +0,0 @@
-deepbots.robots package
-=======================
-
-Subpackages
------------
-
-.. toctree::
- :maxdepth: 4
-
- deepbots.robots.controllers
-
-Module contents
----------------
-
-.. automodule:: deepbots.robots
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docs/source/deepbots.rst b/docs/source/deepbots.rst
deleted file mode 100644
index b1aa46d..0000000
--- a/docs/source/deepbots.rst
+++ /dev/null
@@ -1,19 +0,0 @@
-deepbots package
-================
-
-Subpackages
------------
-
-.. toctree::
- :maxdepth: 4
-
- deepbots.robots
- deepbots.supervisor
-
-Module contents
----------------
-
-.. automodule:: deepbots
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.controllers.rst b/docs/source/deepbots.supervisor.controllers.rst
deleted file mode 100644
index ff5ff46ab..0000000
--- a/docs/source/deepbots.supervisor.controllers.rst
+++ /dev/null
@@ -1,45 +0,0 @@
-deepbots.supervisor.controllers package
-=======================================
-
-Submodules
-----------
-
-deepbots.supervisor.controllers.csv\_supervisor\_env module
------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.csv_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.controllers.deepbots\_supervisor\_env module
-----------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.deepbots_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.controllers.emitter\_receiver\_supervisor\_env module
--------------------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.emitter_receiver_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.controllers.robot\_supervisor\_env module
--------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.robot_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-Module contents
----------------
-
-.. automodule:: deepbots.supervisor.controllers
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.rst b/docs/source/deepbots.supervisor.rst
deleted file mode 100644
index 43253a5..0000000
--- a/docs/source/deepbots.supervisor.rst
+++ /dev/null
@@ -1,19 +0,0 @@
-deepbots.supervisor package
-===========================
-
-Subpackages
------------
-
-.. toctree::
- :maxdepth: 4
-
- deepbots.supervisor.controllers
- deepbots.supervisor.wrappers
-
-Module contents
----------------
-
-.. automodule:: deepbots.supervisor
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.wrappers.rst b/docs/source/deepbots.supervisor.wrappers.rst
deleted file mode 100644
index 2e48902..0000000
--- a/docs/source/deepbots.supervisor.wrappers.rst
+++ /dev/null
@@ -1,29 +0,0 @@
-deepbots.supervisor.wrappers package
-====================================
-
-Submodules
-----------
-
-deepbots.supervisor.wrappers.keyboard\_printer module
------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.wrappers.keyboard_printer
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.wrappers.tensorboard\_wrapper module
---------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.wrappers.tensorboard_wrapper
- :members:
- :undoc-members:
- :show-inheritance:
-
-Module contents
----------------
-
-.. automodule:: deepbots.supervisor.wrappers
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docs/source/modules.rst b/docs/source/modules.rst
deleted file mode 100644
index 846aa79..0000000
--- a/docs/source/modules.rst
+++ /dev/null
@@ -1,7 +0,0 @@
-deepbots
-========
-
-.. toctree::
- :maxdepth: 4
-
- deepbots
From ce26c4776727dfb80c72402b1c53d3b0a8d4232b Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Fri, 2 Jun 2023 23:54:34 +0300
Subject: [PATCH 128/139] Removed fail on warning
---
.readthedocs.yaml | 2 +-
docs/index.rst | 2 --
2 files changed, 1 insertion(+), 3 deletions(-)
diff --git a/.readthedocs.yaml b/.readthedocs.yaml
index ca009ee..528f9d7 100644
--- a/.readthedocs.yaml
+++ b/.readthedocs.yaml
@@ -18,7 +18,7 @@ build:
# Build documentation in the docs/ directory with Sphinx
sphinx:
configuration: docs/conf.py
- fail_on_warning: true
+ fail_on_warning: false
# If using Sphinx, optionally build your docs in additional formats such as PDF
# formats:
diff --git a/docs/index.rst b/docs/index.rst
index df33a66..4b53ef8 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -81,5 +81,3 @@ Indices and tables
* :ref:`genindex`
* :ref:`modindex`
-
-:modindex:
From b878443edbeb4f66acc17f911958e9f8e87bbaf4 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:00:18 +0300
Subject: [PATCH 129/139] Path insertion shenanigans
---
docs/conf.py | 3 ++-
1 file changed, 2 insertions(+), 1 deletion(-)
diff --git a/docs/conf.py b/docs/conf.py
index b7d0b12..467e45f 100644
--- a/docs/conf.py
+++ b/docs/conf.py
@@ -13,8 +13,9 @@
import os
import sys
-sys.path.insert(0, os.path.abspath('..'))
+sys.path.insert(0, os.path.abspath('../'))
sys.path.insert(0, os.path.abspath('../deepbots'))
+sys.path.insert(0, os.path.abspath('.'))
# -- Project information -----------------------------------------------------
From 969e74c741b4bcdb057874ca4d49a6a9d96515c3 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:02:47 +0300
Subject: [PATCH 130/139] More path shenanigans? last try
---
docs/conf.py | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/docs/conf.py b/docs/conf.py
index 467e45f..e014622 100644
--- a/docs/conf.py
+++ b/docs/conf.py
@@ -14,7 +14,7 @@
import sys
sys.path.insert(0, os.path.abspath('../'))
-sys.path.insert(0, os.path.abspath('../deepbots'))
+sys.path.insert(0, os.path.abspath('../deepbots/'))
sys.path.insert(0, os.path.abspath('.'))
# -- Project information -----------------------------------------------------
From 73552d37edcadc65a6486b0656ab80ed79f6b873 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:06:04 +0300
Subject: [PATCH 131/139] Moved custom files, added autogenerated
---
.../deepbots/deepbots.robots.controllers.rst | 0
{docs => docker}/deepbots/deepbots.rst | 0
.../deepbots.supervisor.controllers.rst | 0
.../deepbots/deepbots.supervisor.rst | 0
.../deepbots/deepbots.supervisor.wrappers.rst | 0
docs/index.rst | 2 +-
docs/source/deepbots.robots.controllers.rst | 29 ++++++++++++
docs/source/deepbots.robots.rst | 18 ++++++++
docs/source/deepbots.rst | 19 ++++++++
.../deepbots.supervisor.controllers.rst | 45 +++++++++++++++++++
docs/source/deepbots.supervisor.rst | 19 ++++++++
docs/source/deepbots.supervisor.wrappers.rst | 29 ++++++++++++
docs/source/modules.rst | 7 +++
13 files changed, 167 insertions(+), 1 deletion(-)
rename {docs => docker}/deepbots/deepbots.robots.controllers.rst (100%)
rename {docs => docker}/deepbots/deepbots.rst (100%)
rename {docs => docker}/deepbots/deepbots.supervisor.controllers.rst (100%)
rename {docs => docker}/deepbots/deepbots.supervisor.rst (100%)
rename {docs => docker}/deepbots/deepbots.supervisor.wrappers.rst (100%)
create mode 100644 docs/source/deepbots.robots.controllers.rst
create mode 100644 docs/source/deepbots.robots.rst
create mode 100644 docs/source/deepbots.rst
create mode 100644 docs/source/deepbots.supervisor.controllers.rst
create mode 100644 docs/source/deepbots.supervisor.rst
create mode 100644 docs/source/deepbots.supervisor.wrappers.rst
create mode 100644 docs/source/modules.rst
diff --git a/docs/deepbots/deepbots.robots.controllers.rst b/docker/deepbots/deepbots.robots.controllers.rst
similarity index 100%
rename from docs/deepbots/deepbots.robots.controllers.rst
rename to docker/deepbots/deepbots.robots.controllers.rst
diff --git a/docs/deepbots/deepbots.rst b/docker/deepbots/deepbots.rst
similarity index 100%
rename from docs/deepbots/deepbots.rst
rename to docker/deepbots/deepbots.rst
diff --git a/docs/deepbots/deepbots.supervisor.controllers.rst b/docker/deepbots/deepbots.supervisor.controllers.rst
similarity index 100%
rename from docs/deepbots/deepbots.supervisor.controllers.rst
rename to docker/deepbots/deepbots.supervisor.controllers.rst
diff --git a/docs/deepbots/deepbots.supervisor.rst b/docker/deepbots/deepbots.supervisor.rst
similarity index 100%
rename from docs/deepbots/deepbots.supervisor.rst
rename to docker/deepbots/deepbots.supervisor.rst
diff --git a/docs/deepbots/deepbots.supervisor.wrappers.rst b/docker/deepbots/deepbots.supervisor.wrappers.rst
similarity index 100%
rename from docs/deepbots/deepbots.supervisor.wrappers.rst
rename to docker/deepbots/deepbots.supervisor.wrappers.rst
diff --git a/docs/index.rst b/docs/index.rst
index 4b53ef8..b96a5ce 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -34,7 +34,7 @@ Contents
:maxdepth: 2
:caption: Reference
- deepbots/deepbots
+ source/modules
Official resources
------------------
diff --git a/docs/source/deepbots.robots.controllers.rst b/docs/source/deepbots.robots.controllers.rst
new file mode 100644
index 0000000..94ae06a
--- /dev/null
+++ b/docs/source/deepbots.robots.controllers.rst
@@ -0,0 +1,29 @@
+deepbots.robots.controllers package
+===================================
+
+Submodules
+----------
+
+deepbots.robots.controllers.csv\_robot module
+---------------------------------------------
+
+.. automodule:: deepbots.robots.controllers.csv_robot
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.robots.controllers.emitter\_receiver\_robot module
+-----------------------------------------------------------
+
+.. automodule:: deepbots.robots.controllers.emitter_receiver_robot
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Module contents
+---------------
+
+.. automodule:: deepbots.robots.controllers
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.robots.rst b/docs/source/deepbots.robots.rst
new file mode 100644
index 0000000..491c017
--- /dev/null
+++ b/docs/source/deepbots.robots.rst
@@ -0,0 +1,18 @@
+deepbots.robots package
+=======================
+
+Subpackages
+-----------
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots.robots.controllers
+
+Module contents
+---------------
+
+.. automodule:: deepbots.robots
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.rst b/docs/source/deepbots.rst
new file mode 100644
index 0000000..b1aa46d
--- /dev/null
+++ b/docs/source/deepbots.rst
@@ -0,0 +1,19 @@
+deepbots package
+================
+
+Subpackages
+-----------
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots.robots
+ deepbots.supervisor
+
+Module contents
+---------------
+
+.. automodule:: deepbots
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.controllers.rst b/docs/source/deepbots.supervisor.controllers.rst
new file mode 100644
index 0000000..ff5ff46ab
--- /dev/null
+++ b/docs/source/deepbots.supervisor.controllers.rst
@@ -0,0 +1,45 @@
+deepbots.supervisor.controllers package
+=======================================
+
+Submodules
+----------
+
+deepbots.supervisor.controllers.csv\_supervisor\_env module
+-----------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.csv_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.controllers.deepbots\_supervisor\_env module
+----------------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.deepbots_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.controllers.emitter\_receiver\_supervisor\_env module
+-------------------------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.emitter_receiver_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.controllers.robot\_supervisor\_env module
+-------------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.controllers.robot_supervisor_env
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Module contents
+---------------
+
+.. automodule:: deepbots.supervisor.controllers
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.rst b/docs/source/deepbots.supervisor.rst
new file mode 100644
index 0000000..43253a5
--- /dev/null
+++ b/docs/source/deepbots.supervisor.rst
@@ -0,0 +1,19 @@
+deepbots.supervisor package
+===========================
+
+Subpackages
+-----------
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots.supervisor.controllers
+ deepbots.supervisor.wrappers
+
+Module contents
+---------------
+
+.. automodule:: deepbots.supervisor
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/deepbots.supervisor.wrappers.rst b/docs/source/deepbots.supervisor.wrappers.rst
new file mode 100644
index 0000000..2e48902
--- /dev/null
+++ b/docs/source/deepbots.supervisor.wrappers.rst
@@ -0,0 +1,29 @@
+deepbots.supervisor.wrappers package
+====================================
+
+Submodules
+----------
+
+deepbots.supervisor.wrappers.keyboard\_printer module
+-----------------------------------------------------
+
+.. automodule:: deepbots.supervisor.wrappers.keyboard_printer
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+deepbots.supervisor.wrappers.tensorboard\_wrapper module
+--------------------------------------------------------
+
+.. automodule:: deepbots.supervisor.wrappers.tensorboard_wrapper
+ :members:
+ :undoc-members:
+ :show-inheritance:
+
+Module contents
+---------------
+
+.. automodule:: deepbots.supervisor.wrappers
+ :members:
+ :undoc-members:
+ :show-inheritance:
diff --git a/docs/source/modules.rst b/docs/source/modules.rst
new file mode 100644
index 0000000..846aa79
--- /dev/null
+++ b/docs/source/modules.rst
@@ -0,0 +1,7 @@
+deepbots
+========
+
+.. toctree::
+ :maxdepth: 4
+
+ deepbots
From 89dfe40616361132fea9041689c3a8b6c956a304 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:26:12 +0300
Subject: [PATCH 132/139] fail on warning
---
.readthedocs.yaml | 2 +-
1 file changed, 1 insertion(+), 1 deletion(-)
diff --git a/.readthedocs.yaml b/.readthedocs.yaml
index 528f9d7..ca009ee 100644
--- a/.readthedocs.yaml
+++ b/.readthedocs.yaml
@@ -18,7 +18,7 @@ build:
# Build documentation in the docs/ directory with Sphinx
sphinx:
configuration: docs/conf.py
- fail_on_warning: false
+ fail_on_warning: true
# If using Sphinx, optionally build your docs in additional formats such as PDF
# formats:
From 01134152744f285e236eb8db866e907c4eb76e09 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:27:46 +0300
Subject: [PATCH 133/139] Switched custom with autogenerated to start trying to
make it work
---
{docs => docker}/source/deepbots.robots.controllers.rst | 0
{docs => docker}/source/deepbots.robots.rst | 0
{docs => docker}/source/deepbots.rst | 0
{docs => docker}/source/deepbots.supervisor.controllers.rst | 0
{docs => docker}/source/deepbots.supervisor.rst | 0
{docs => docker}/source/deepbots.supervisor.wrappers.rst | 0
{docs => docker}/source/modules.rst | 0
{docker => docs}/deepbots/deepbots.robots.controllers.rst | 0
{docker => docs}/deepbots/deepbots.rst | 0
{docker => docs}/deepbots/deepbots.supervisor.controllers.rst | 0
{docker => docs}/deepbots/deepbots.supervisor.rst | 0
{docker => docs}/deepbots/deepbots.supervisor.wrappers.rst | 0
12 files changed, 0 insertions(+), 0 deletions(-)
rename {docs => docker}/source/deepbots.robots.controllers.rst (100%)
rename {docs => docker}/source/deepbots.robots.rst (100%)
rename {docs => docker}/source/deepbots.rst (100%)
rename {docs => docker}/source/deepbots.supervisor.controllers.rst (100%)
rename {docs => docker}/source/deepbots.supervisor.rst (100%)
rename {docs => docker}/source/deepbots.supervisor.wrappers.rst (100%)
rename {docs => docker}/source/modules.rst (100%)
rename {docker => docs}/deepbots/deepbots.robots.controllers.rst (100%)
rename {docker => docs}/deepbots/deepbots.rst (100%)
rename {docker => docs}/deepbots/deepbots.supervisor.controllers.rst (100%)
rename {docker => docs}/deepbots/deepbots.supervisor.rst (100%)
rename {docker => docs}/deepbots/deepbots.supervisor.wrappers.rst (100%)
diff --git a/docs/source/deepbots.robots.controllers.rst b/docker/source/deepbots.robots.controllers.rst
similarity index 100%
rename from docs/source/deepbots.robots.controllers.rst
rename to docker/source/deepbots.robots.controllers.rst
diff --git a/docs/source/deepbots.robots.rst b/docker/source/deepbots.robots.rst
similarity index 100%
rename from docs/source/deepbots.robots.rst
rename to docker/source/deepbots.robots.rst
diff --git a/docs/source/deepbots.rst b/docker/source/deepbots.rst
similarity index 100%
rename from docs/source/deepbots.rst
rename to docker/source/deepbots.rst
diff --git a/docs/source/deepbots.supervisor.controllers.rst b/docker/source/deepbots.supervisor.controllers.rst
similarity index 100%
rename from docs/source/deepbots.supervisor.controllers.rst
rename to docker/source/deepbots.supervisor.controllers.rst
diff --git a/docs/source/deepbots.supervisor.rst b/docker/source/deepbots.supervisor.rst
similarity index 100%
rename from docs/source/deepbots.supervisor.rst
rename to docker/source/deepbots.supervisor.rst
diff --git a/docs/source/deepbots.supervisor.wrappers.rst b/docker/source/deepbots.supervisor.wrappers.rst
similarity index 100%
rename from docs/source/deepbots.supervisor.wrappers.rst
rename to docker/source/deepbots.supervisor.wrappers.rst
diff --git a/docs/source/modules.rst b/docker/source/modules.rst
similarity index 100%
rename from docs/source/modules.rst
rename to docker/source/modules.rst
diff --git a/docker/deepbots/deepbots.robots.controllers.rst b/docs/deepbots/deepbots.robots.controllers.rst
similarity index 100%
rename from docker/deepbots/deepbots.robots.controllers.rst
rename to docs/deepbots/deepbots.robots.controllers.rst
diff --git a/docker/deepbots/deepbots.rst b/docs/deepbots/deepbots.rst
similarity index 100%
rename from docker/deepbots/deepbots.rst
rename to docs/deepbots/deepbots.rst
diff --git a/docker/deepbots/deepbots.supervisor.controllers.rst b/docs/deepbots/deepbots.supervisor.controllers.rst
similarity index 100%
rename from docker/deepbots/deepbots.supervisor.controllers.rst
rename to docs/deepbots/deepbots.supervisor.controllers.rst
diff --git a/docker/deepbots/deepbots.supervisor.rst b/docs/deepbots/deepbots.supervisor.rst
similarity index 100%
rename from docker/deepbots/deepbots.supervisor.rst
rename to docs/deepbots/deepbots.supervisor.rst
diff --git a/docker/deepbots/deepbots.supervisor.wrappers.rst b/docs/deepbots/deepbots.supervisor.wrappers.rst
similarity index 100%
rename from docker/deepbots/deepbots.supervisor.wrappers.rst
rename to docs/deepbots/deepbots.supervisor.wrappers.rst
From cd77ebcc6f6d8862c38492e1057ea816bf892d62 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:28:36 +0300
Subject: [PATCH 134/139] Added module contents to deepbots.rst
---
docs/deepbots/deepbots.rst | 10 +++++++++-
docs/index.rst | 2 +-
2 files changed, 10 insertions(+), 2 deletions(-)
diff --git a/docs/deepbots/deepbots.rst b/docs/deepbots/deepbots.rst
index f8c399f..d8f64a6 100644
--- a/docs/deepbots/deepbots.rst
+++ b/docs/deepbots/deepbots.rst
@@ -5,4 +5,12 @@ deepbots
:maxdepth: 2
deepbots.robots.controllers
- deepbots.supervisor
\ No newline at end of file
+ deepbots.supervisor
+
+Module contents
+---------------
+
+.. automodule:: deepbots
+ :members:
+ :undoc-members:
+ :show-inheritance:
\ No newline at end of file
diff --git a/docs/index.rst b/docs/index.rst
index b96a5ce..4b53ef8 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -34,7 +34,7 @@ Contents
:maxdepth: 2
:caption: Reference
- source/modules
+ deepbots/deepbots
Official resources
------------------
From 21b3ab0cff45f139955f37765108e702480bd1b6 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:30:50 +0300
Subject: [PATCH 135/139] Removed header
---
docs/deepbots/deepbots.rst | 3 ---
1 file changed, 3 deletions(-)
diff --git a/docs/deepbots/deepbots.rst b/docs/deepbots/deepbots.rst
index d8f64a6..8bdbd0f 100644
--- a/docs/deepbots/deepbots.rst
+++ b/docs/deepbots/deepbots.rst
@@ -7,9 +7,6 @@ deepbots
deepbots.robots.controllers
deepbots.supervisor
-Module contents
----------------
-
.. automodule:: deepbots
:members:
:undoc-members:
From 08acc9fc4fe370d98aa784140fa6db1d4e0de98c Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:35:06 +0300
Subject: [PATCH 136/139] Added automodules everywhere fingers crossed
---
docs/deepbots/deepbots.robots.controllers.rst | 5 +++++
docs/deepbots/deepbots.supervisor.controllers.rst | 5 +++++
docs/deepbots/deepbots.supervisor.rst | 5 +++++
docs/deepbots/deepbots.supervisor.wrappers.rst | 5 +++++
4 files changed, 20 insertions(+)
diff --git a/docs/deepbots/deepbots.robots.controllers.rst b/docs/deepbots/deepbots.robots.controllers.rst
index 004d973..da2caee 100644
--- a/docs/deepbots/deepbots.robots.controllers.rst
+++ b/docs/deepbots/deepbots.robots.controllers.rst
@@ -10,3 +10,8 @@ deepbots.robots.controllers
:members:
:undoc-members:
:show-inheritance:
+
+.. automodule:: deepbots.robots.controllers
+ :members:
+ :undoc-members:
+ :show-inheritance:
\ No newline at end of file
diff --git a/docs/deepbots/deepbots.supervisor.controllers.rst b/docs/deepbots/deepbots.supervisor.controllers.rst
index 4020b1e..30ecfd8 100644
--- a/docs/deepbots/deepbots.supervisor.controllers.rst
+++ b/docs/deepbots/deepbots.supervisor.controllers.rst
@@ -20,3 +20,8 @@ deepbots.supervisor.controllers
:members:
:undoc-members:
:show-inheritance:
+
+.. automodule:: deepbots.supervisor.controllers
+ :members:
+ :undoc-members:
+ :show-inheritance:
\ No newline at end of file
diff --git a/docs/deepbots/deepbots.supervisor.rst b/docs/deepbots/deepbots.supervisor.rst
index 6e82224..de75bc4 100644
--- a/docs/deepbots/deepbots.supervisor.rst
+++ b/docs/deepbots/deepbots.supervisor.rst
@@ -6,3 +6,8 @@ deepbots.supervisor
deepbots.supervisor.controllers
deepbots.supervisor.wrappers
+
+.. automodule:: deepbots.supervisor
+ :members:
+ :undoc-members:
+ :show-inheritance:
\ No newline at end of file
diff --git a/docs/deepbots/deepbots.supervisor.wrappers.rst b/docs/deepbots/deepbots.supervisor.wrappers.rst
index aa990c6..38001df 100644
--- a/docs/deepbots/deepbots.supervisor.wrappers.rst
+++ b/docs/deepbots/deepbots.supervisor.wrappers.rst
@@ -10,3 +10,8 @@ deepbots.supervisor.wrappers
:members:
:undoc-members:
:show-inheritance:
+
+.. automodule:: deepbots.supervisor.wrappers
+ :members:
+ :undoc-members:
+ :show-inheritance:
\ No newline at end of file
From b4f89fe7787f0bddb38f0b33286c61cbf416b827 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:37:42 +0300
Subject: [PATCH 137/139] Modindex working, modified section name
---
docs/index.rst | 4 ++--
1 file changed, 2 insertions(+), 2 deletions(-)
diff --git a/docs/index.rst b/docs/index.rst
index 4b53ef8..2238689 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -76,8 +76,8 @@ research and innovation programme under grant agreement No 871449 (OpenDR).
This publication reflects the authors’ views only. The European Commission is
not responsible for any use that may be made of the information it contains.
-Indices and tables
--------------------
+Indices
+-------
* :ref:`genindex`
* :ref:`modindex`
From 4375e5e7e023daf882d48ddc1afcff543e4bf319 Mon Sep 17 00:00:00 2001
From: tsampazk <27914645+tsampazk@users.noreply.github.com>
Date: Sat, 3 Jun 2023 00:37:55 +0300
Subject: [PATCH 138/139] Removed autogenerated files
---
docker/source/deepbots.robots.controllers.rst | 29 ------------
docker/source/deepbots.robots.rst | 18 --------
docker/source/deepbots.rst | 19 --------
.../deepbots.supervisor.controllers.rst | 45 -------------------
docker/source/deepbots.supervisor.rst | 19 --------
.../source/deepbots.supervisor.wrappers.rst | 29 ------------
docker/source/modules.rst | 7 ---
7 files changed, 166 deletions(-)
delete mode 100644 docker/source/deepbots.robots.controllers.rst
delete mode 100644 docker/source/deepbots.robots.rst
delete mode 100644 docker/source/deepbots.rst
delete mode 100644 docker/source/deepbots.supervisor.controllers.rst
delete mode 100644 docker/source/deepbots.supervisor.rst
delete mode 100644 docker/source/deepbots.supervisor.wrappers.rst
delete mode 100644 docker/source/modules.rst
diff --git a/docker/source/deepbots.robots.controllers.rst b/docker/source/deepbots.robots.controllers.rst
deleted file mode 100644
index 94ae06a..0000000
--- a/docker/source/deepbots.robots.controllers.rst
+++ /dev/null
@@ -1,29 +0,0 @@
-deepbots.robots.controllers package
-===================================
-
-Submodules
-----------
-
-deepbots.robots.controllers.csv\_robot module
----------------------------------------------
-
-.. automodule:: deepbots.robots.controllers.csv_robot
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.robots.controllers.emitter\_receiver\_robot module
------------------------------------------------------------
-
-.. automodule:: deepbots.robots.controllers.emitter_receiver_robot
- :members:
- :undoc-members:
- :show-inheritance:
-
-Module contents
----------------
-
-.. automodule:: deepbots.robots.controllers
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docker/source/deepbots.robots.rst b/docker/source/deepbots.robots.rst
deleted file mode 100644
index 491c017..0000000
--- a/docker/source/deepbots.robots.rst
+++ /dev/null
@@ -1,18 +0,0 @@
-deepbots.robots package
-=======================
-
-Subpackages
------------
-
-.. toctree::
- :maxdepth: 4
-
- deepbots.robots.controllers
-
-Module contents
----------------
-
-.. automodule:: deepbots.robots
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docker/source/deepbots.rst b/docker/source/deepbots.rst
deleted file mode 100644
index b1aa46d..0000000
--- a/docker/source/deepbots.rst
+++ /dev/null
@@ -1,19 +0,0 @@
-deepbots package
-================
-
-Subpackages
------------
-
-.. toctree::
- :maxdepth: 4
-
- deepbots.robots
- deepbots.supervisor
-
-Module contents
----------------
-
-.. automodule:: deepbots
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docker/source/deepbots.supervisor.controllers.rst b/docker/source/deepbots.supervisor.controllers.rst
deleted file mode 100644
index ff5ff46ab..0000000
--- a/docker/source/deepbots.supervisor.controllers.rst
+++ /dev/null
@@ -1,45 +0,0 @@
-deepbots.supervisor.controllers package
-=======================================
-
-Submodules
-----------
-
-deepbots.supervisor.controllers.csv\_supervisor\_env module
------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.csv_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.controllers.deepbots\_supervisor\_env module
-----------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.deepbots_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.controllers.emitter\_receiver\_supervisor\_env module
--------------------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.emitter_receiver_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.controllers.robot\_supervisor\_env module
--------------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.controllers.robot_supervisor_env
- :members:
- :undoc-members:
- :show-inheritance:
-
-Module contents
----------------
-
-.. automodule:: deepbots.supervisor.controllers
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docker/source/deepbots.supervisor.rst b/docker/source/deepbots.supervisor.rst
deleted file mode 100644
index 43253a5..0000000
--- a/docker/source/deepbots.supervisor.rst
+++ /dev/null
@@ -1,19 +0,0 @@
-deepbots.supervisor package
-===========================
-
-Subpackages
------------
-
-.. toctree::
- :maxdepth: 4
-
- deepbots.supervisor.controllers
- deepbots.supervisor.wrappers
-
-Module contents
----------------
-
-.. automodule:: deepbots.supervisor
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docker/source/deepbots.supervisor.wrappers.rst b/docker/source/deepbots.supervisor.wrappers.rst
deleted file mode 100644
index 2e48902..0000000
--- a/docker/source/deepbots.supervisor.wrappers.rst
+++ /dev/null
@@ -1,29 +0,0 @@
-deepbots.supervisor.wrappers package
-====================================
-
-Submodules
-----------
-
-deepbots.supervisor.wrappers.keyboard\_printer module
------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.wrappers.keyboard_printer
- :members:
- :undoc-members:
- :show-inheritance:
-
-deepbots.supervisor.wrappers.tensorboard\_wrapper module
---------------------------------------------------------
-
-.. automodule:: deepbots.supervisor.wrappers.tensorboard_wrapper
- :members:
- :undoc-members:
- :show-inheritance:
-
-Module contents
----------------
-
-.. automodule:: deepbots.supervisor.wrappers
- :members:
- :undoc-members:
- :show-inheritance:
diff --git a/docker/source/modules.rst b/docker/source/modules.rst
deleted file mode 100644
index 846aa79..0000000
--- a/docker/source/modules.rst
+++ /dev/null
@@ -1,7 +0,0 @@
-deepbots
-========
-
-.. toctree::
- :maxdepth: 4
-
- deepbots
From fca73923cc594546fc5088696c61bcc4d079cc83 Mon Sep 17 00:00:00 2001
From: Kostas Tsampazis <27914645+tsampazk@users.noreply.github.com>
Date: Thu, 8 Jun 2023 21:20:23 +0300
Subject: [PATCH 139/139] Added link to relevant PR on note
---
docs/index.rst | 3 ++-
1 file changed, 2 insertions(+), 1 deletion(-)
diff --git a/docs/index.rst b/docs/index.rst
index 2238689..45887c2 100644
--- a/docs/index.rst
+++ b/docs/index.rst
@@ -6,7 +6,8 @@
.. note::
- The documentation site is under active development.
+ The documentation site is under active development. Check out `this PR `_
+ for an idea on what to expect in the future!
`Deepbots `_ is a simple framework
which is used as "middleware" between the free and open-source