![]()
Concise motion estimator on an occupied grid map with a static viewpoint, whose basic algorithm has been presented on a domestic conference. (I will present it in some international conference or journal with some improvement.) This package is available on ROS 2 Humble.
This is a ROS 2 repository using ros2_rust. The way of installation and execution are based on the manual or ros2_rust. They may be different from the ways of regular (Python or C++) packages.
As the author is not used to ros2_rust, parameters and names of topics are fixed at present.
- topic for subscribing
/scan(sensor_msgs/LaserScan): scan data from 2D LiDAR
- topic for publising
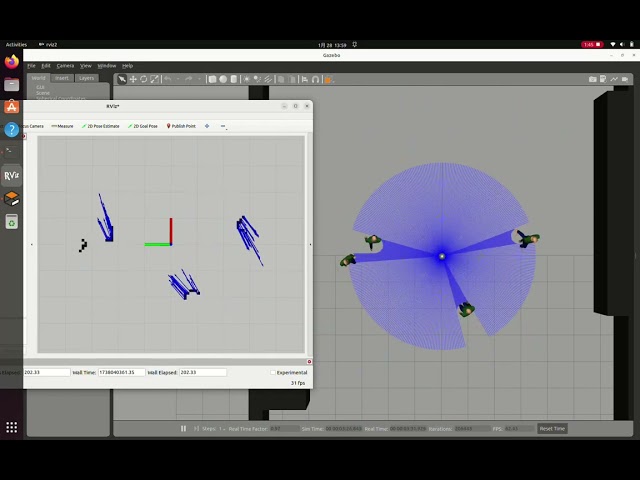
/scan_map(nav_msgs/OccupancyGrid): an occupancy grid map simply reflecting the latest scan/static_obstacle_map(nav_msgs/OccupancyGrid): an occupancy grid map of static objects/estimaton_array(visualization_msgs/MarkerArray): estimation results (vectors)- vector
- start: current position of a part of an obstacle
- end: forecast of the position after one second
- vector
- ROS 2 Humble: https://docs.ros.org/en/humble/index.html
- ros2_rust: https://github.com/ros2-rust/ros2_rust
There is no launch files since I have never understood how to write them for ros2_rust packages. Instead, I placed a bash script in launch directory. This script builds and runs flow_estimator node. Moreover, it plays a bag file which contains messages on /scan topic. So as you launch rviz2 from another terminal, you can observe messages on the estimaton_array topic.
© 2025 Ryuichi Ueda